
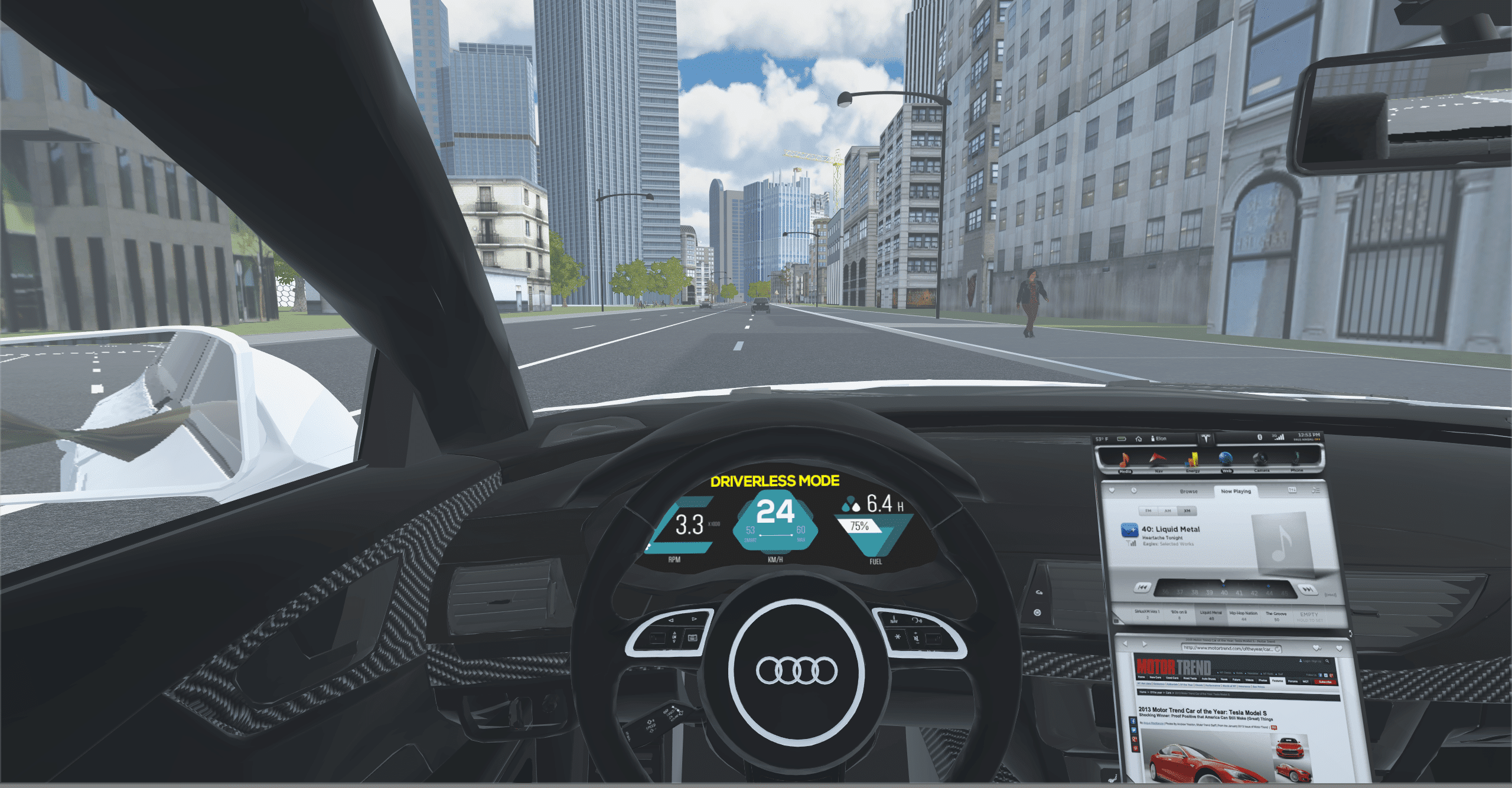
A core motivation for this MSc thesis was the realization that traditional text-based surveys struggle to evoke the same emotional weight and realism as truly immersive experiences. By placing participants in the passenger seat of a virtual autonomous vehicle facing an unavoidable collision, we could observe moral decision-making under genuine stress. Built in Unity for the Oculus Rift, the simulation presented a series of on-rails scenarios in which the car must choose between two harmful outcomes—different numbers or types of pedestrians—forcing users to confront the “trolley problem” in three dimensions rather than on paper.
Each scenario was crafted to heighten presence and believability. With the OptiTrack system calibrated to map users’ head movements directly into the VR world, participants turned, looked down the road, and saw AI-driven pedestrians meandering realistically across crosswalks. As the vehicle approached a crisis point, audio-visual cues—engine hum, tire squeal, distant traffic sounds—built tension, and a moment of decision was triggered: swerve left or right? After each run, subjects completed a structured questionnaire probing their sense of presence and moral rationale, allowing us to compare their in-VR choices against conventional survey data.
Although the pilot sample was small, responses confirmed that immersive VR elicits both strong emotional reactions and decisions largely aligned with established moral frameworks—yet with subtle divergences under pressure. Participants reported high levels of “being there,” and their free-form explanations often referenced visceral feelings (“my heart raced when I saw them step off the curb”). These findings suggest that VR can reveal nuances in ethical judgments that static questionnaires might miss, paving the way for larger studies and more varied dilemma scenarios.
Key Challenges
- OptiTrack Calibration & Integration: Learning to configure multiple cameras and markers so that users’ real-world head and hand movements translated precisely into Unity, without jitter or drift.
- Realistic Pedestrian Behavior: Designing AI walkers with randomized paths and natural pacing—balancing performance constraints with enough variety to keep each moral scenario fresh.
- Synchronized Data Capture: Ensuring that decision points in the simulation, motion-capture timestamps, and post-run questionnaire triggers all aligned perfectly, so each participant’s responses could be accurately matched to the exact moment of choice.