Existent is an end-to-end application framework for virtual reality integrated withUnreal Engine 5 that allows developers to build physically interactive, free-roam, multiplayer VR in hours, not months.
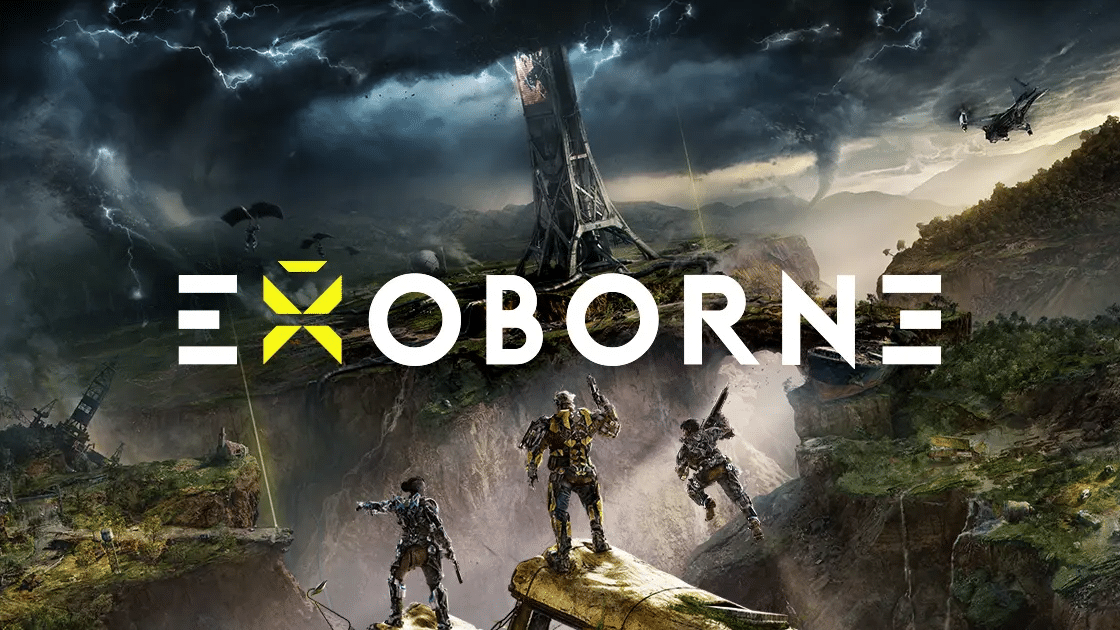
During my tenure at Sharkmob, I contributed to Exoborne, a premium post-apocalyptic extraction shooter,powered by Unreal Engine 5, announced at The Game Awards 2023. The game features open-world PvP, PvE elements, and extreme weather challenges in a devastated southeastern United States.
During the Covid-19 lockdown I decided to assemble a 3D printer and print a series of gadgets that can be used for entertainment (gaming/VR). This includes a dual-sided lightsaber for VR, a F1 steering wheel and a fully magnetic Catan board game.
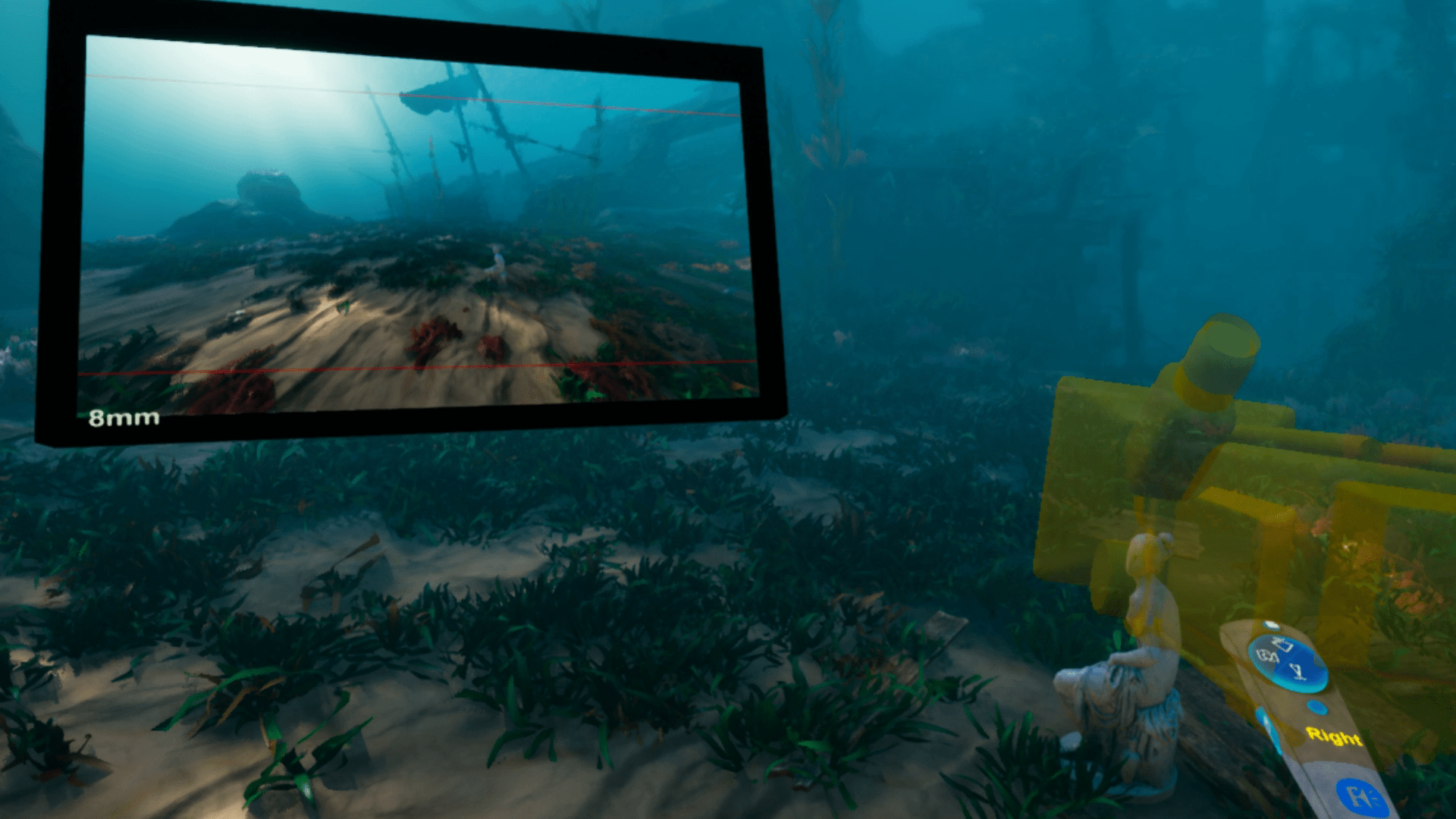
Virtual Scouting in Framestore’s proprietary platform fARsight allows filmmakers to navigate and interact in virtual environments, helping them make better creative decisions.
The project showcases the capabilities of the Magic Leap headset while also promoting Warner Bros. film Fantastic Beasts: The Crimes of Grindelwald, the follow up film to 2016’s Fantastic Beasts and Where to Find Them.
Working for Volkswagen Group China Import, as part of the team of Framestore we created the VW Touareg Hyper Reality Test Drive, the world’s first live VR test drive experience.
Forza Street is built from the ground up to bring Forza to PC and mobile gamers around the world. Enter the ultimate street racing scene to win the car collection of your dreams.
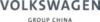
VR for the Study of Moral Dilemmas involving Driverless Cars
A VR simulation was designed and developed for users to be able to fully experience a moral dilemma leading to an accident, as the passengers of a virtual autonomous vehicle.
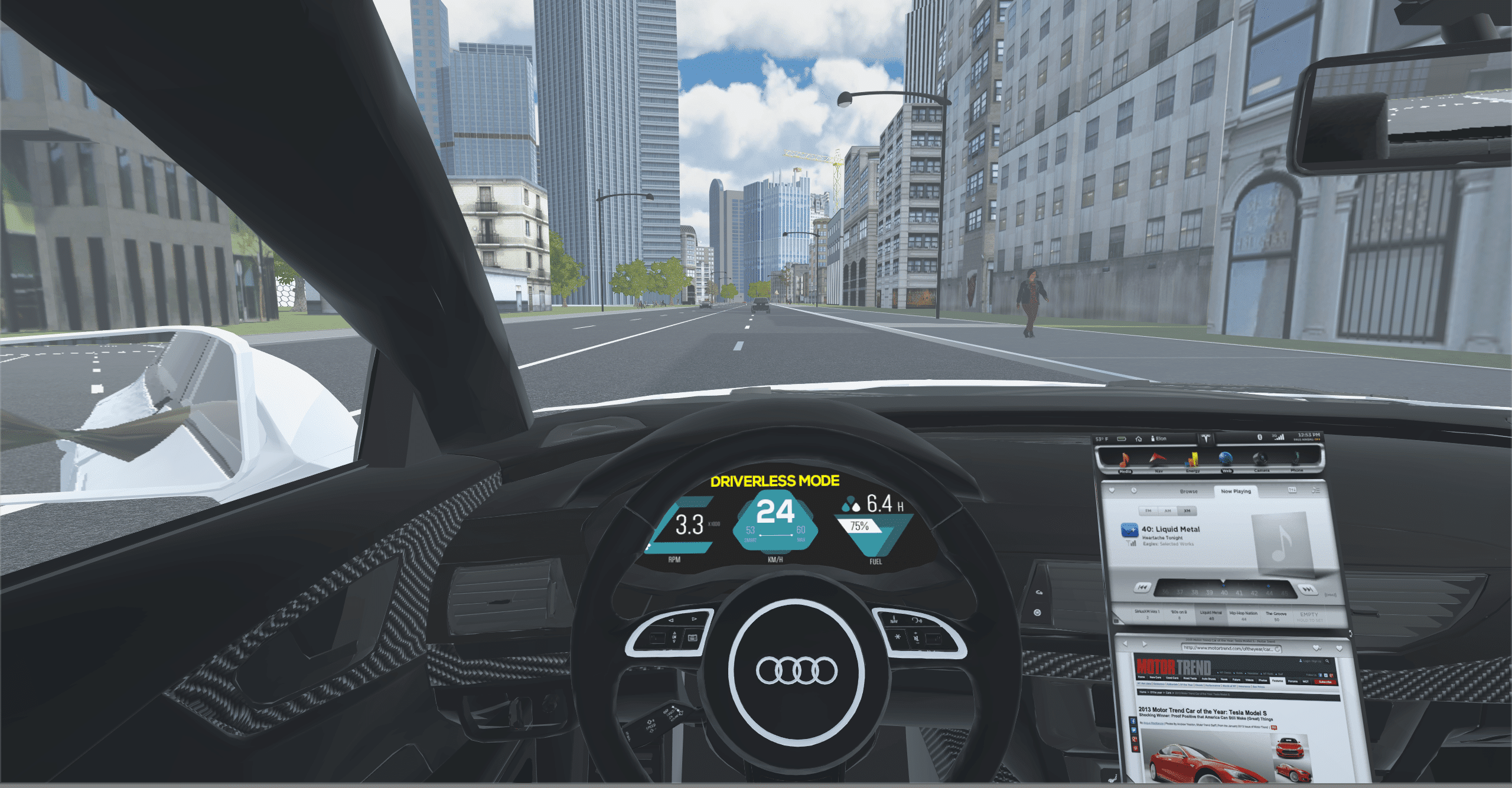
Reverse-engineered an intuitive game interface for locomotion in VR environments and built an alpine-skiing immersive environment simulation for a C.A.V.E to demonstrate its effectiveness.
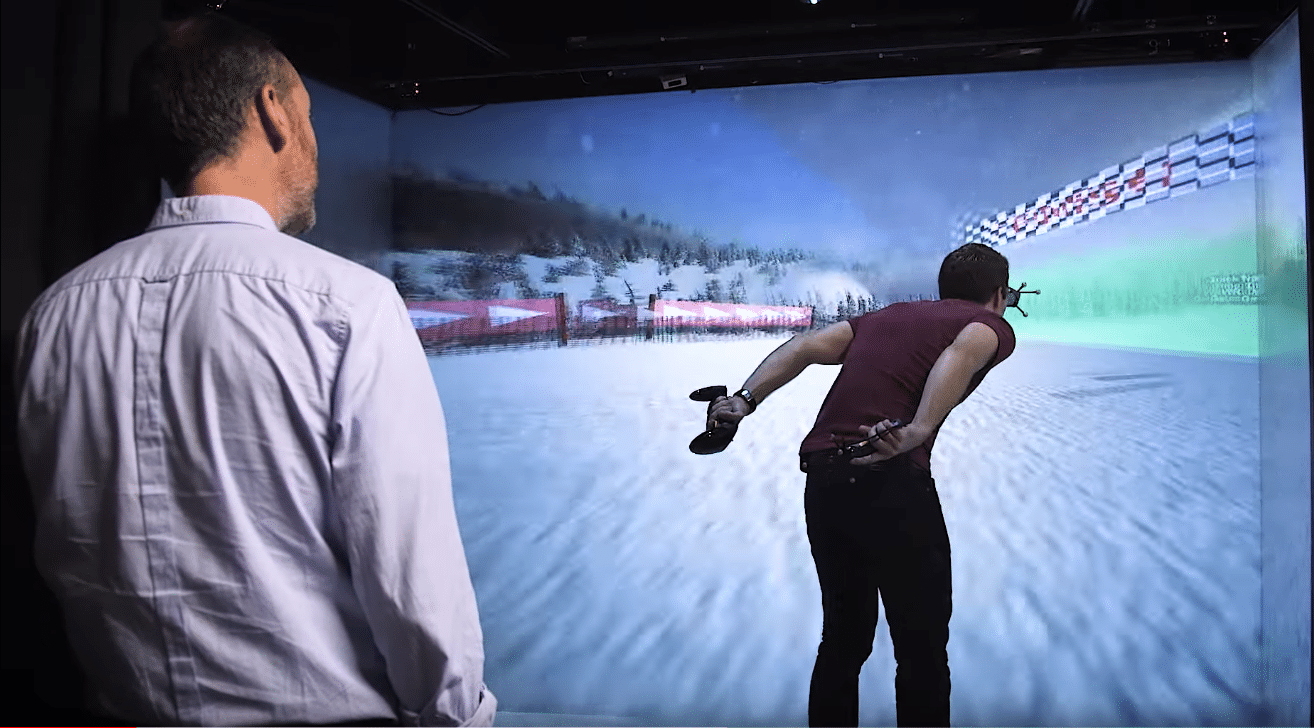
An interactive AR Chess developed, focused on providing an immersive experience to users so that they are able to manipulate virtual chess pieces in front of a real table and play against a chess engine.
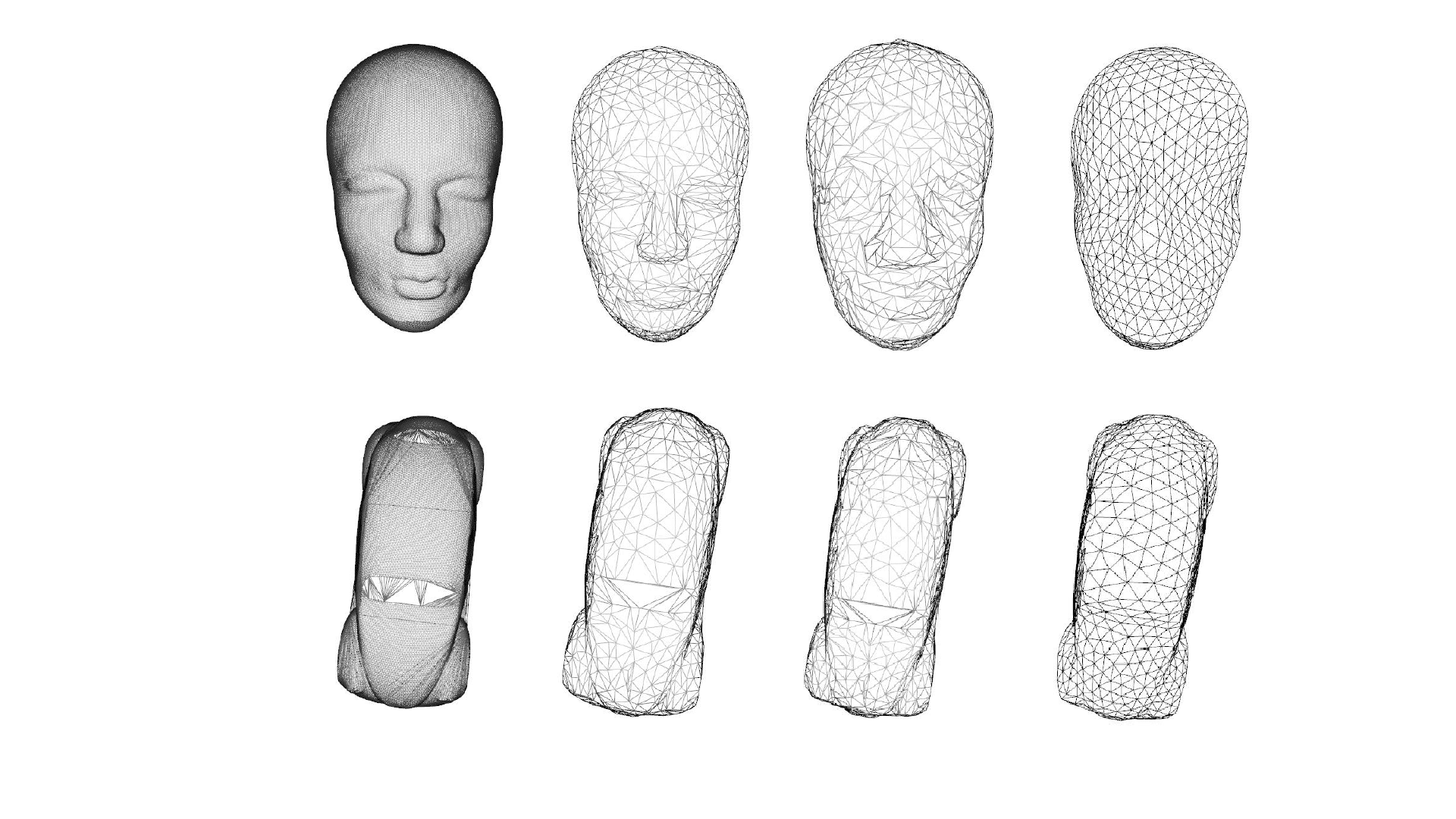
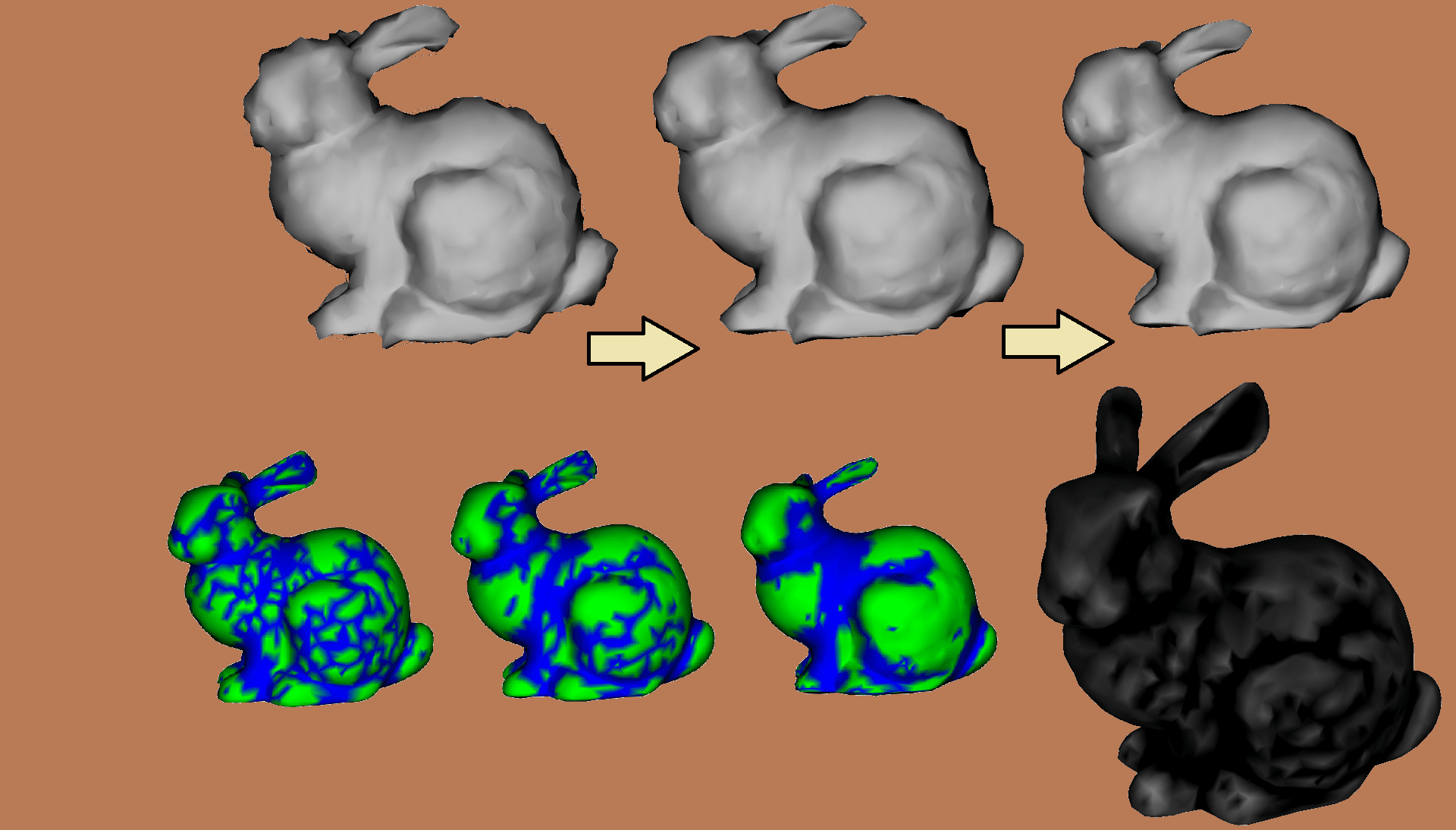
Acquisition of useful features of 3D models such as mean curvature, gaussian curvature and principal curvatures and implementation of explicit and implicit mesh denoising.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}